STM32 firmware development
HAL, motor control, PID, sensor fusion (IMU, IR, LiDAR over UART/I2C), DMA, event-driven control loops. From hobbyist projects to competition-grade systems.
Starting at $50/hr
Embedded robotics engineering
End-to-end embedded engineering by Szymon Bogus. Two-time RoboRAVE world champion, hands-on builder.
HAL, motor control, PID, sensor fusion (IMU, IR, LiDAR over UART/I2C), DMA, event-driven control loops. From hobbyist projects to competition-grade systems.
Custom boards from motor drivers and sensor breakouts to full robot main boards, including PCB-as-structure designs.
End-to-end small robot or embedded device design and build. Mechanical CAD, custom electronics, firmware, fabrication, integration.
Inventor parts and assemblies designed for FDM 3D printing, resin printing, and steel CNC machining. Includes export-ready files (STL, STEP) and fabrication-aware design choices: warping, tolerances, ribs, fastener fits.

STM32F411CEU6. Custom 4-layer Altium PCB. DRV8251 motor drivers, LIS3DH IMU, TF-Luna LiDAR over UART, IR via ADC+DMA, OLED over I2C. Steel CNC base, 3D-printed structure, custom cast silicone wheels, 4-wheel drive with custom gearbox.
Watch the build
STM32F405RGT6. PCB designed as the structural element. DRV8873 wheel drivers, BLDC turbine via ESC, IMU + IR sensor array. Turbine designed from scratch, N60 motors with 7:1 gearing, carbon parts. PID-tuned, IMU and line sensor calibration.
Watch the build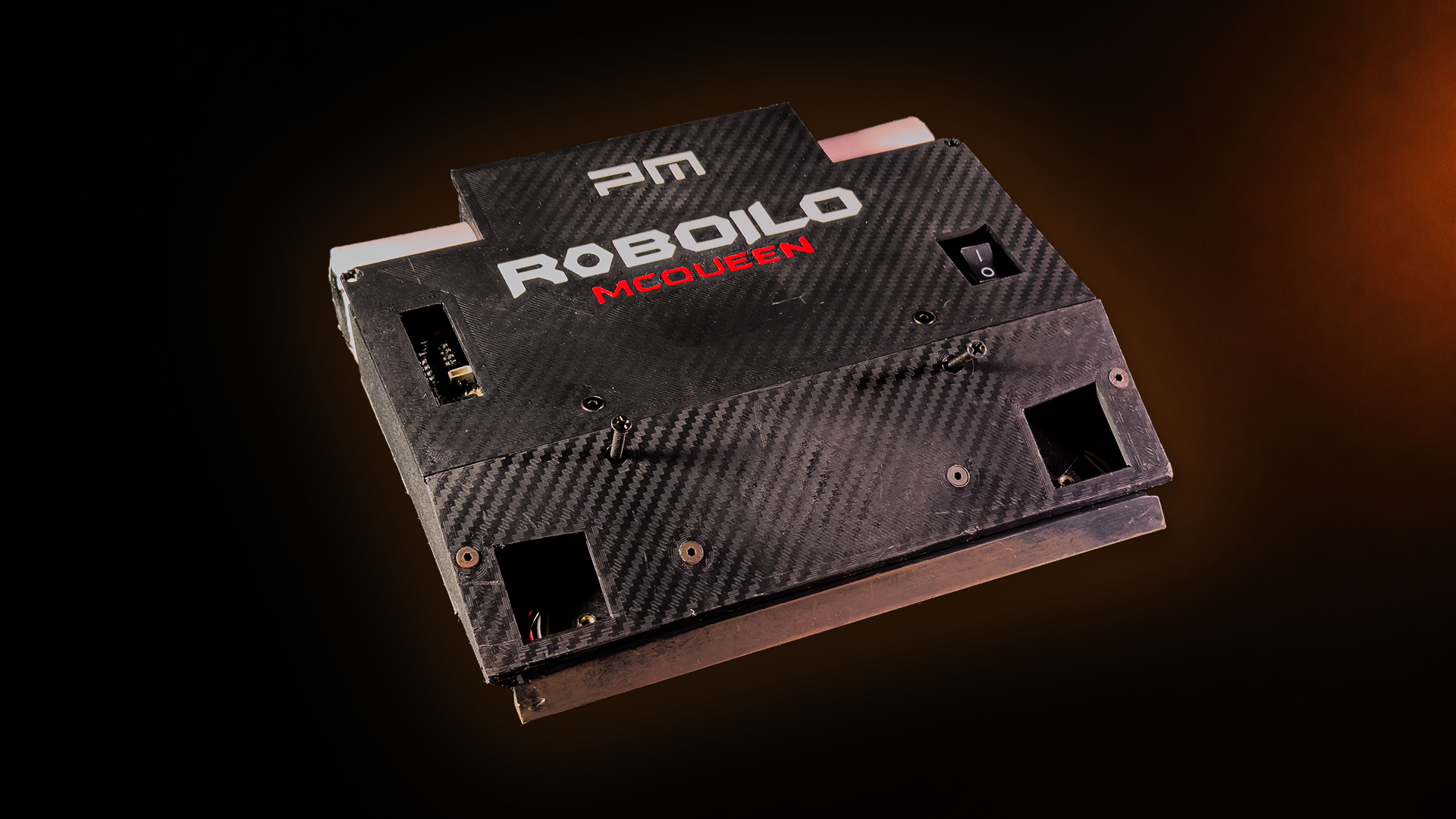
STM32G431. Custom motor driver PCB in Altium. LiDAR over UART, IR via ADC+DMA. CNC and 3D-printed modular base. Solo SUMO bot build from 2024.
Tell me what you are building. I respond within 48 hours.